
")
![]()
Ansys Design Analysis


Ansys SpaceClaim for Excavator Design
An excavator design for the lunar rover prototype was created using Ansys SpaceClaim, a 3-D computer-aided design software.
Once the excavator design was finalized, Ansys extracted metrics such as the volume and area of the excavator claw. The Figure below is a picture of an excavator design and its corresponding volume.
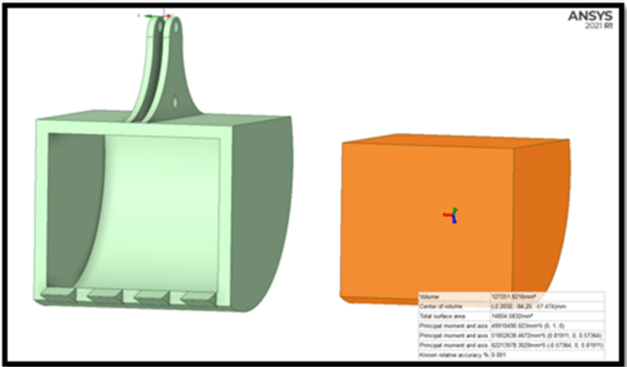
Ansys SpaceClaim supported the lunar rover project by providing data for calculations to determine the excavator's maximum load capacity.
Pressure-Given Load Capacity
The Pressure Equation was used with each load capacity, 80% and 60%, to calculate the tolerance of pressure that can be exerted on the excavator design.

80% Load Capacity

60% Load Capacity
The pressure exerted on the excavator design at 80% load capacity was calculated to be 4.3 MPa. The pressure exerted on the excavator design at 60% load capacity was calculated to be 3.2 MPa.
Pressure Impact Specifications
After the pressure values were found, they were inputted in Ansys Static Structural to further analyze the excavator design. A fixed support point was needed to identify where the excavator claw would be attached to the robotic arm. Fix support defines correct boundary conditions as in the physical model. The purple shaded area in the Ansys Static Structural drawing below highlights this support poin
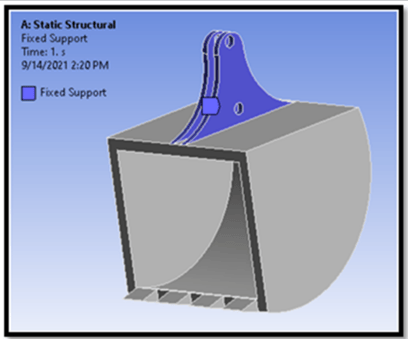
Fix Support Point of Excavator Claw
A pressure area was also defined in Ansys as the bucket area of the excavator claw. This is where the excavator design will take on the most pressure. The red-shaded area in the Ansys drawing below highlights this area. The direction of the pressure is expressed as the black area on the red area. The amount of pressure exerted was also recorded in Ansys.
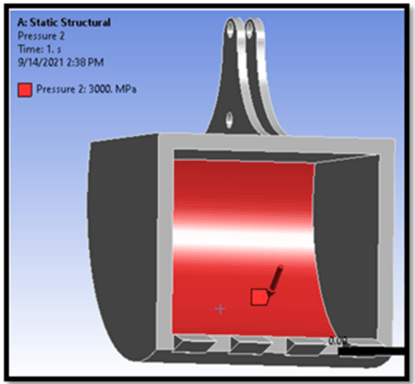
Pressure Area of Excavator
Pressure-Given Load Capacity
Once Ansys Static Structural had all the needed data inputs, the final analysis of the excavator was performed.
Prototype Excavator Filled with 80% Regolith

Excavator Deformation with 80% Capacity Animation

Excavator Strain with 80% Capacity Animation

Excavator Stress with 80% Capacity Animation
Prototype Excavator Filled with 60% Regolith

Excavator Deformation with 60% Capacity Animation

Excavator Strain with 60% Capacity Animation

Excavator Stress with 60% Capacity Animation
Fatigue Analysis vs. Excavation Cycle
The results show the structural analysis of the excavator design. Evaluating the structural analysis is to determine the strength and stability of the design under actual loading conditions. Some of the analysis that was considered are the following:
- Strain
- Stress
- Deformation
These strain, stress, and deformation will lead to fatigue in the excavator claw. Fatigue was determined by calculating each excavation cycle. An excavation cycle is the excavator digging up regolith. The most pressure will be endured during the excavation and repetitive cycles will lead to failure of the excavator. The fatigue analysis determines that the max strain, stress, and deformation will occur after a number of cycles. This cycle for the according load capacity follows:

Knowing the failure of the excavation cycle could lead to a preferred maintenance schedule and plan. This will also assist in determining more accurate results when simulating the rover's excavation mission.
The Excavation Subsystem
In the context of the lunar rover mission, the excavation subsystem is responsible for collecting lunar regolith from the moon's surface. However, the process of collecting regolith comes with its own set of challenges, including the risk of damage to the excavator claw, which cannot be repaired and comprise the mission.
A diagram and simulation were created to highlight the excavation process of the lunar rover. To mitigate risk, the process was divided into two cycles: Excavation Cycle & Maintenance Cycle. This can be seen in the diagram below.

The excavation cycle focuses on the design and load capacity of the excavator claw and the rover storage bed, ensuring that the claw can collect a certain amount of regolith without exceeding the maximum load capacity of the rover's bed. This is important because the rover's bed can only transport a certain amount of regolith back to NASA's Regolith Water Plant for further processing.
The maintenance cycle takes into consideration the pressure tolerance of the excavator claw and how it can withstand damage during the excavation process. If the excavator claw gets damaged, the maintenance cycle constrains the amount of regolith collection since the claw cannot be repaired on the moon. The maintenance cycle will collect regolith and keep track of the amount until failure.
